In the previous few blogposts, we have talked a lot about the QSL cards we have sent to you throughout [… Read more]
LA1K / LA1ARK / LA1UKA
Category: Guides (page 1 of 5)

Last fall, after 3 years of downtime on the 160m band, an eager gang put in the effort of finally [… Read more]

By the fall of 2018, it was time to replace the ropes supporting our 160 m wire dipole. The flag [… Read more]
Enabling use of a USRP N210 connected to a single computer from other computers on the local network
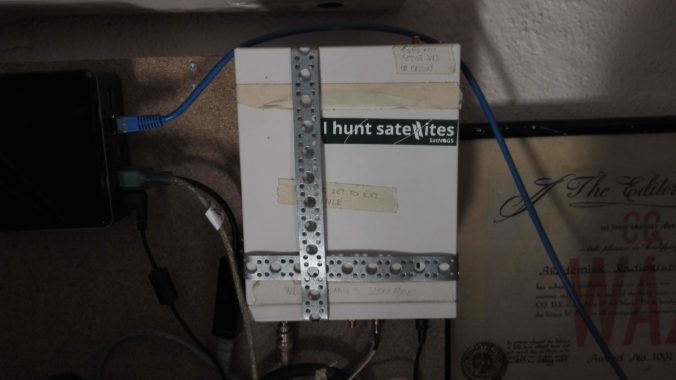
Alright – our USRP N210 is still broken, but we managed to draft a blog post about it while it [… Read more]
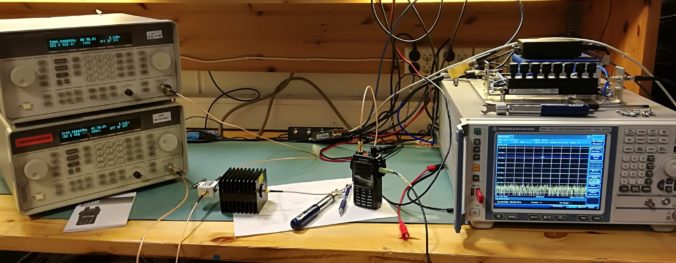
Last summer we wrote an article on the Yaesu FT-25E handheld transceiver in collaboration with the Norwegian ham radio magazine [… Read more]
Sponsors
We are proud to present our sponsors.


If you like what we do, get in touch with us over email to discuss a collaboration.
© 2026 Akademisk Radioklubb
Theme by Anders Norén — Up ↑