Trondheim has been struck by excellent weather for two weeks, culminating in great weather on May 17. We did not want to miss out on this chance, so we decided it was time for a SOTA activation the day after. LA/ST-014 Rabbolen is one of the closest 2-point summits we have not yet visited, but now was a good opportunity.
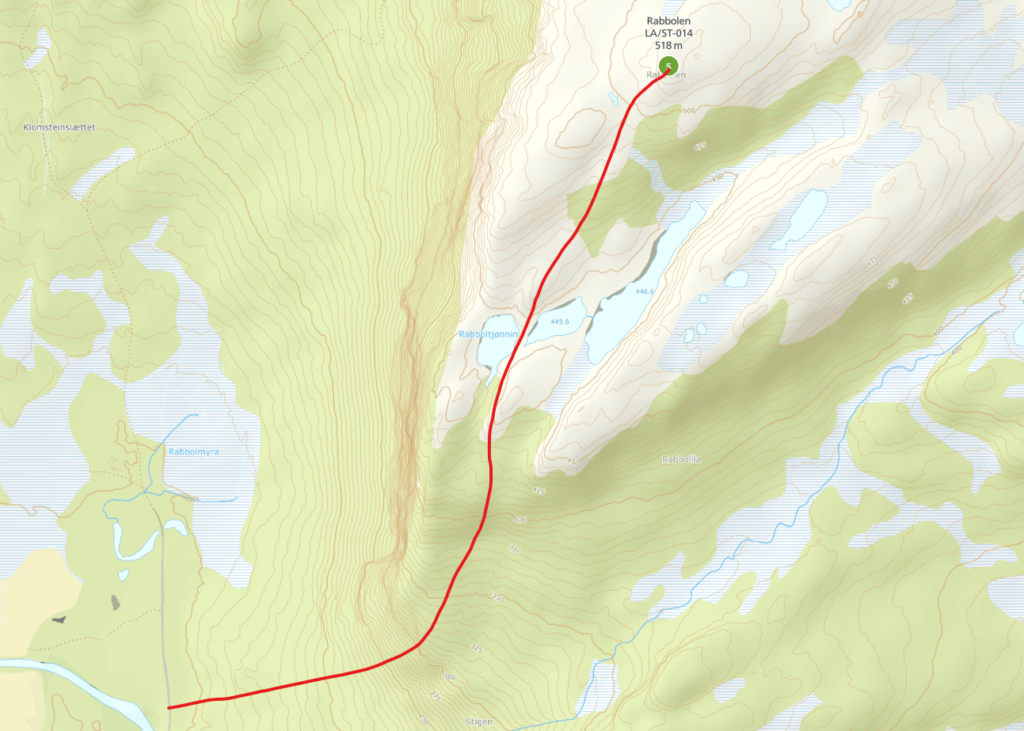
Trip reports on the internet indicated that there was a clear path up to the top, but we could not find the path on any maps. Still, we were sufficiently confident that we knew the starting point and roughly where to go. The internet turned out to be right, and both the parking lot and the path were easy to find. It started out quite steep, but the second half was much easier.

We brought our common setup with FT-891, a 24 Ah LiFePO battery, and a homebrew vertical built around our HeathKit tuner. We were not completely discouraged from trying 10m after the failure at Resfjellet, and got two QSOs using the same antenna. We also brought the equivalent antenna for the much more stable 20m band, which allowed us to get the required QSOs.

The weather was warm, but it was quite windy and the wind increased while we were there. Still not a problem for our relatively low wind load antenna. After LB5DH and LB0CJ had activated the summit, one of our newest members, Tobi Nygilo, had a try. Without a callsign, he could not activate the SOTA-summit, but he still got some other QSOs. With some QSOs and some curious looks from other hikers, we decided it was time to pack down and go home.

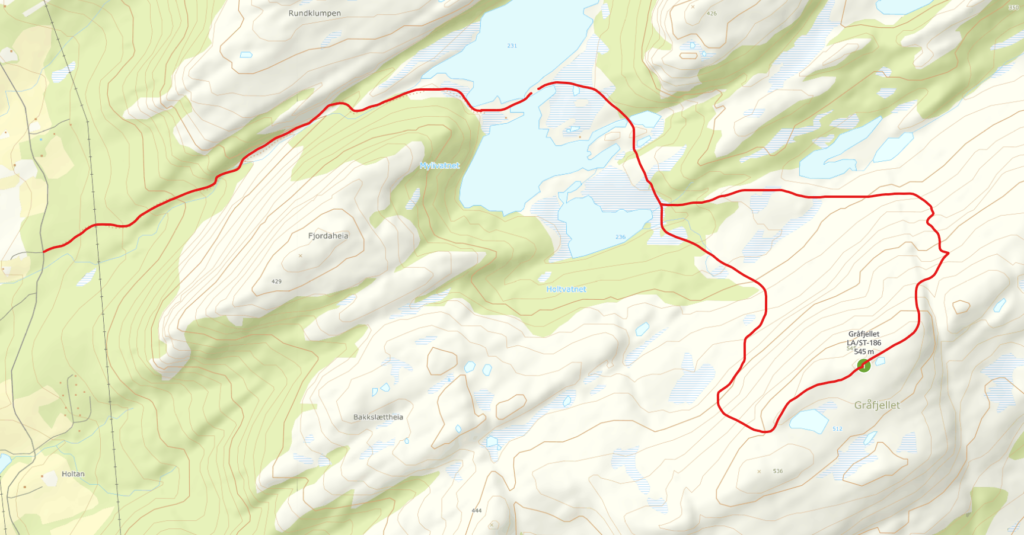
This had been a short but very nice trip, so nice that we spontaneously decided to try another the day after. After a brief discussion at midnight, LB5DH and Tobi decided to try LA/ST-186 Gråfjellet. Unlike Rabbolen, we did not expect any path for the final ascent up to the top, but we decided it would be a fine challenge.


We started by swiftly walking up the section of path we had on this trip, through a picturesque valley up to a pair of cabins. The path ended here, but we continued around the lakes and toward the summit. It was too steep to climb straight up, but we found a neat canyon that took us to the plateau at the top.


At the top, we found a still place to place the shack and a windy one to place the antenna. As often before, we used our fishing rod vertical antenna, which has a relatively small wind load (which has been established several times already). This time, we only brought our 20m vertical.

SOTA activations usually yield a good QSO rate, and this was no exception. First, LB5DH activated the summit, and then Tobi got the mic. With it, he got several QSOs, including another portable station.

We wanted to try a different route down and decided on the east side of the summit. It was quite steep, but not too steep to pass. It probably wasn’t any shorter, but seeing that side of the summit was still nice.

Thanks to LB0CJ, Tobi and LB5DH for two great SOTA-activations this weekend.