Introduction: In the previous part, we talked about how ARK was involved in getting the transmitter license in Norway established, which was the starting point for transmitting amateur radio. In this edition, we will look at the equipment ARK has had over the years. This includes both our own built equipment and, eventually, how more commercial equipment entered the shack.
Homemade pioneering
At the start, the culture of building oneself was particularly strong in the club simply because there was no commercially available equipment for transmission. In the early 1930s, you had quite primitive transmitters, if you compare it with today’s equipment. The transmitters were often directly keyed oscillators that went straight to the antenna. The fact that the signals weren’t that clean didn’t matter as much, as there were only a few thousand active radio amateurs worldwide. The antenna in the club at that time was a vertical antenna, placed on top of the stage house of the Student Society, with ladder feeders or so-called “Jakob’s-leider” as the feed cable.
It is unknown what iteration this transmitter is.
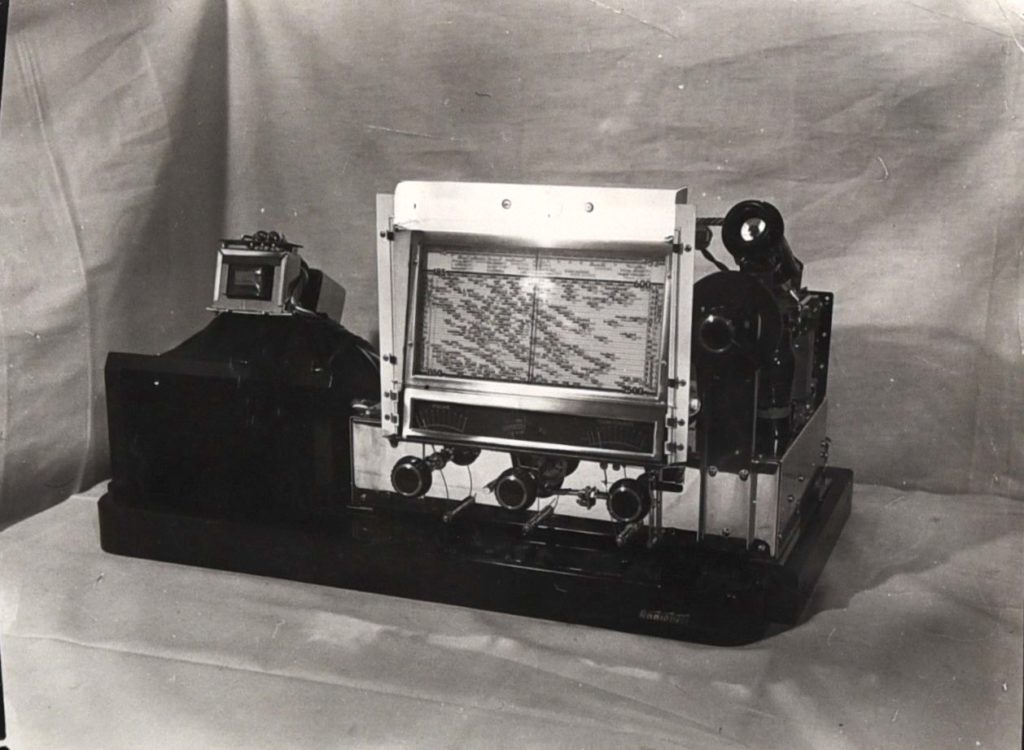
The receiver of ARK, in contrast, was quite advanced for the time. It was a so-called “Autodyne receiver”, which was a kind of superheterodyne design where a pentode tube was used as a mixer. This was built to replace the club’s old reaction receiver sometime in the early 30s. Radio tubes were, of course, very expensive at the time. It was desirable to get a hold of old, used tubes to cut the cost, but with the hobby being quite new and all, allocating such tubes required some effort. Some of them came as replaced tubes from “Trøndelag Kringkaster” (Trøndelag Broadcaster); other times, it happened that we got new ones as a gift. Another way to get “new” tubes was to send them into a glassblower in Drammen, who replaced the old filament inside and then resealed the glass casing.
In addition to this, there are constant references to equipment that was used when ARK and their “amplifier committee” started with loudspeaker systems at the Student Society. Among other things, it refers to a radio receiver called Dovregubben or “Gåvredubben”, which was begged and donated from Standard in 1938.
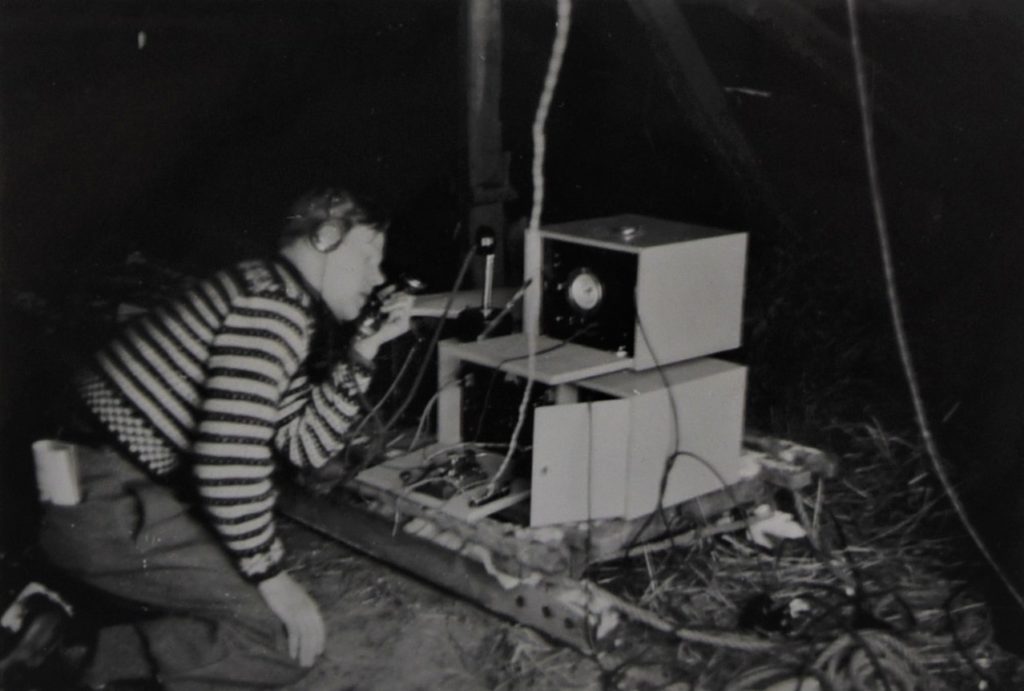
Beyond the mid-1930s, the radio activity was a bit meager, partly because the antenna on the roof had fallen down and the receiver inside was out of order. Those who had been the most active eventually graduated from the university as well, and it was now up to new forces to take over. After a few dud years, two new members joined in 1937, who then went ahead and rebuilt the station with the help of the old parts lying around. They got it all wired up and found that the set-up worked perfectly with the club’s 40m “Zepp” – a type of end-fed antenna. They also built several transportable stations, which were to be used for reports during the “6th International Academic Winter Games” in 1939. These were referred to as “portable transmitters”, which was perhaps somewhat exaggerated – the battery-powered one consisted of 5 boxes with a total weight of 65 kg and thus had to be towed with a sledge! In the April days of 1940, one of these transmitters was actually smuggled out of the Society’s house, right in front of the nose of the German invaders who were on an inspection.
After World War II
On 26 April 1946, ARK finally got back on the air after the war, after a break of almost 7 years. When they were allowed to listen to the ether again, it was with the help of German surplus war material, namely a Lorentz LO 40 K. It had transmission options on the 80, 40, and 20m band, and the input to the final stage was approx. 100W. As the years went by, the transmitter began to become somewhat capricious, which was reflected in the activity in the club. When it was in the right corner, one had to be well aware of its personal whims to get a signal, and when it first worked, it caused severe interference in all the broadcasting equipment that was located at the Student Society.
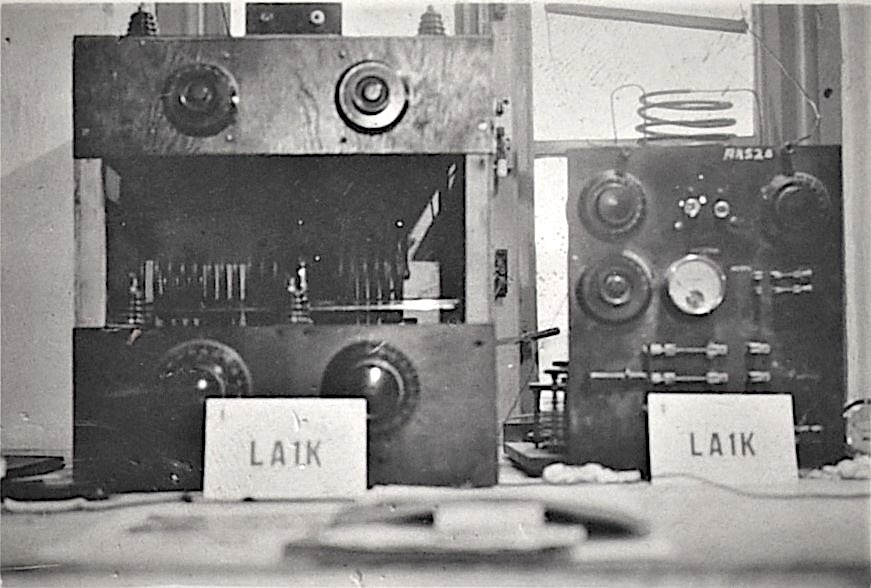
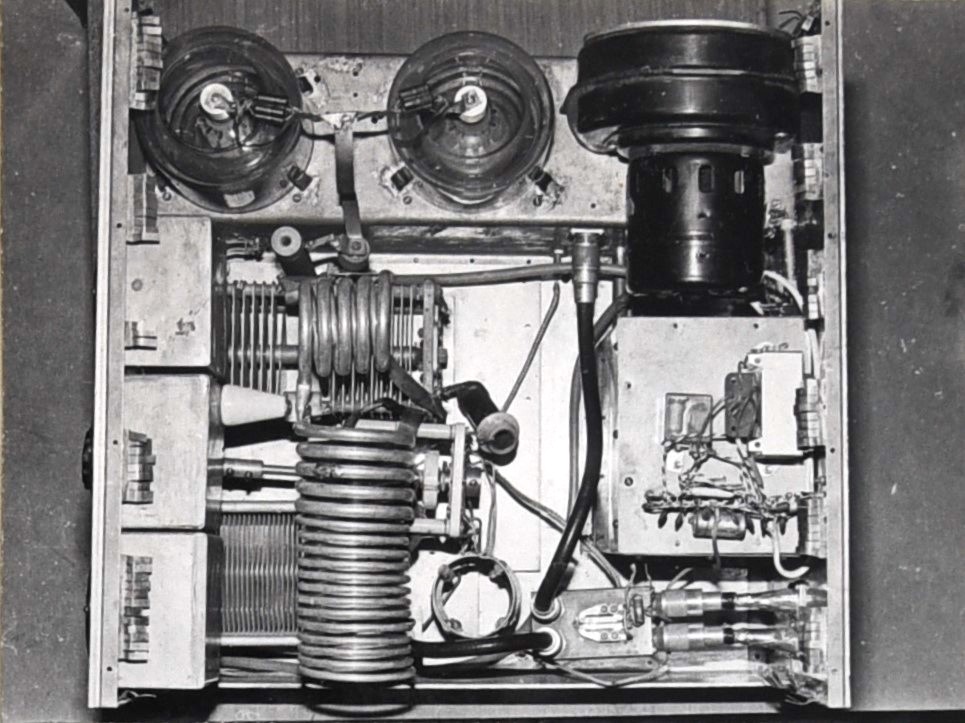
Because of these somewhat “undesirable characteristics,” it was decided that the club would have to acquire a new transmitter. It was a goal to build something that could operate on all the 5 amateur radio bands available at the time, as well as have the ability to run amplitude-modulated SSB. It took a long time, and the station manager had to make a number of excuses before it was finished, but in the autumn of 1954, LA1K could finally play on all five bands, albeit with CW as the only mode. Within a year, the anode modulator was completed, and finally it was now also possible to use SSB over the same five bands. The construction of this transmitter was probably one of the great achievements in ARK’s history, and activity picked up at the same time that LA1K was now being heard for the first time competing in the contests. Among other things, ARK participated in the so-called “Amerikatesten” (“The American Contest”) in 1956, where the club became the best Norwegian station on the scoreboard.
In 1960, the station was expanded fairly significantly, namely, the purchase of an Eddystone 888A receiver. This was some of the first commercially manufactured equipment to enter the shack of ARK, to some skepticism among the club’s older generations. This was nevertheless a significant improvement of the “German equipment” that had been acquired by the club after the war. The receiver was probably a good investment now that the club, on average, made over 4,000 contacts annually. Which, understandably, placed slightly higher demands on the receiver’s ease of operation.
In the early 60s, the old homemade transmitter began to show signs of its age. Among other things, it only worked when the VFO was on high. Due to the increasing repair work to keep it operational, it was decided to invest in a new one instead. The work began, and it was probably only due to intensive maintenance that the old transmitter worked until 1964 – and then the new transmitter was at least operable. Philips came to the rescue with many of the nobler parts so that the new transmitter could be completed without the club going into a financial crisis.

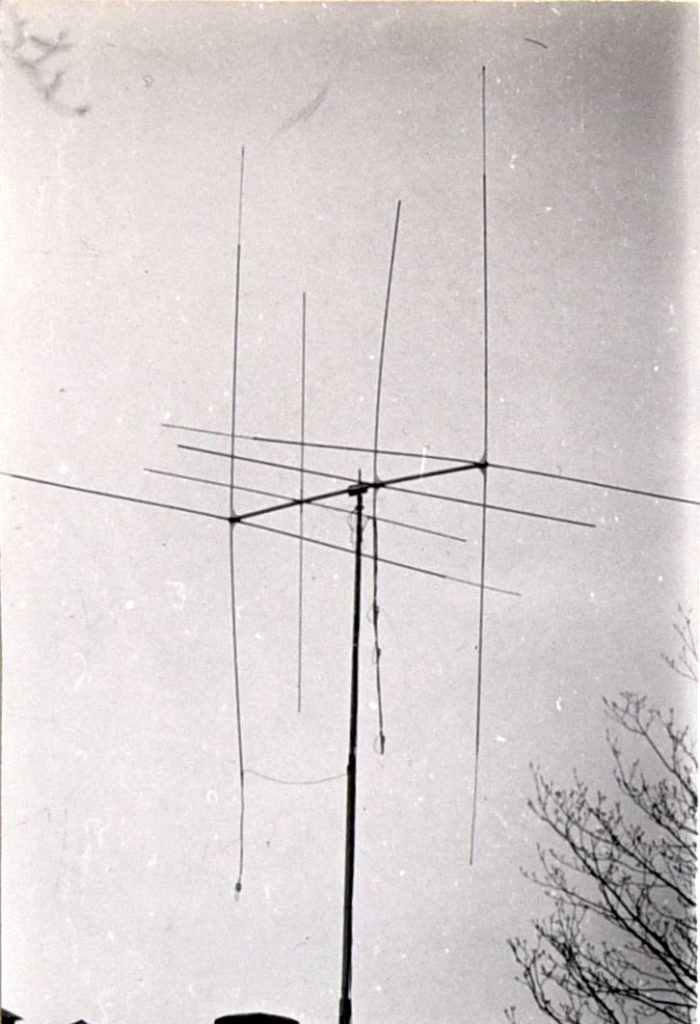
Antenna upgrades
During the summer of 1964, parts of the Student Society were rebuilt, and in addition to slightly larger club areas, the club was finally able to fulfill an old dream: a rotatable, directional antenna. After the foundation was built and the antenna committee approved all its plans, the club really launched an offensive on the beginning front. In addition to a metal lamp post that was bought from Trondheim’s Electricity Company (TEV), the club also got a Mosley TA 33 antenna donated by Carl E. Mosley, W0FQY. He was a radio amateur himself and decided to donate the antenna to the club, requiring the club to pay for shipping and import costs – and the requirement that he was allowed to see a picture of the setup when it was completed. The antenna was left on the roof for a 3-year period from October 1964 to October 1967. Although the project with the new transmitter had been started, it was still nowhere near finished. The transmitter was used and tested during the enrolment of the new TA-33 beam, but the performance was not satisfied. The project was, therefore, exposed to a lot of prodding from perfectionists, and the original sketches were completely redesigned. Among other things, a new PA stage, mixer, and SSB generator were added. Not until 1966 was the transmitter QRV on 4 HF bands – all but 10 meters. Then, ironically enough, one had long ago come to the conclusion that one had to switch to commercially manufactured equipment if one were to assert oneself at the top among amateur stations.

The club had a hunger to get a receiver with better selectivity. After many letters to importers and manufacturers, they eventually landed a good offer for a Hallicrafter SX-117 (pictured above). However, the offer required pickup in the States, and the agreement was that it should be collected by a member going there by sea so that the receiver could be smuggled back into the country duty-free. However, the plan went down the drain when the package never made it to the ship, but fortunately, it worked out when another Norwegian member could pick up the package on a different trip. The new Hallicrafter receiver was a good match for the modified transmitter from 1965. Still, the latter, however, became somewhat “grumpy” when connected to commercial equipment, and the soldering iron had to be constantly brought out to pry action into the transmitter crystals. This new receiver was a solid and expensive investment for the club, which was probably somewhat complicit in the club almost going bankrupt until the old Eddystone 888A receiver was sold.
In 1966, it was 40 years since ARK received the transmitter license and the call sign LA1K. For the occasion, it was thought appropriate to acquire a new station. The club had by no means the finances for such a dreamy investment. Still, with the help of money contributions from the members, enough funds were collected to go towards the purchase of a Hallicrafter SR-150 transceiver. Now, the club was well underway with an expanding desire, and it didn’t take long before the members drooled for a new antenna, namely a “quad,” which was now one of the biggest and best antennas you could get your hands on. The antenna construction probably looked more like a drying rack than anything, but it was comparatively easy to properly dimension and build. Countless cold and horrible hours were spent on the roof to get it started, but at the end of 1967, it was finished in complete disdain for the local climate.
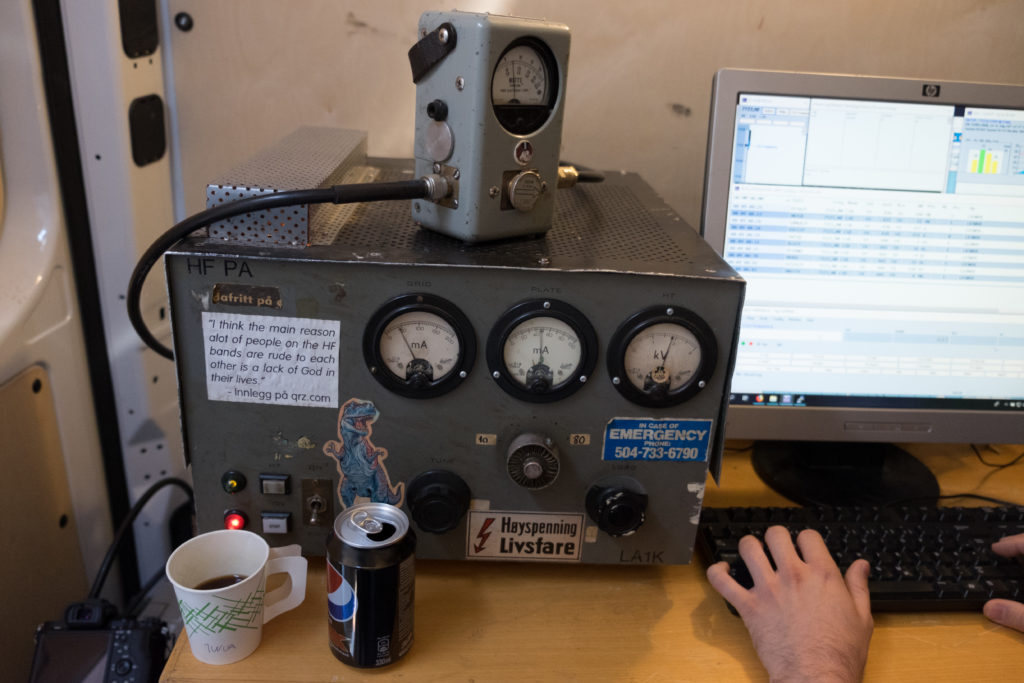
However, the “Quad” was not alone in increasing the efficiency of LA1K. ARK had been responsible for building and operating “UKEsenderen” (The UKE-broadcaster), a radio station that was set up in connection with the UKA student festival. For the 1967 festival, an amplifier was made for the FM transmitter, which was built so that it could easily be converted for the HF amateur band after the festival was over. “Store-PA” (The Big PA), as it was then called, was a good combination with the “Quad,” which ensured that the club was heard loud and clear in the wider world. But even in 1967, there were difficulties with reception due to traffic and the Society’s location, so whether we heard everyone who responded to our calls was really another question.

Expansion by the decades
Toward the end of the 60s in 1969, the club, with the sale of its SX-117 receiver, got funds to buy a much more advanced receiver, a Drake R-4C, in fact. The following year, the club bought the associated transmitter, the Drake T-4XB, from a member to make the set “complete”. In the 70s, the radio rig consisted of rigs on HF, as well as some equipment for the club’s activity on the VHF bands. VHF was mainly used for meteor scatter, but was quickly also used for satellite transmissions when the launch of Oscar-6 in 1972 made it possible. Our current equipment used at the time now consisted of a nice mix of self-made, donated, and purchased inventory.

Throughout the decade, the club purchased various new equipment. In the spring of 1975, with another round of donations from the members and some help from the student social fund, we got enough money to replace the old Drake T-4XB transmitter with a newer model, the Drake T-4XC. Initially, the HF radios could run SSB, CW, and AM. The club also had the equipment to run RTTY, and for a while, there was a desire to get a camera to participate seriously in the mode, SSTV. However, this took some time to achieve, and in 1974, the club acquired pre-recorded audio tapes for responding to incoming calls. By doing this, at least the club had the opportunity to respond to incoming SSTV messages from those who were way better equipped than ourselves.

In the 80s, ARK bought, among other things, an Icom IC-751 transistor radio, which at the time was very modern and had certain advantages compared to the tube radios the club had previously purchased. Now the need to wait for the rig to warm up disappeared literally, and you could now “take off” straight away – without the need for tuning. This was a solid upgrade from the Drake C-line kits. Correspondence from the 80s shows that the club also bought a Kenwood TS-830S, which we supposedly tried to trade away, but looking at the club history a few years later, it was still a part of our inventory into the 90s.
In terms of antennas, in the 80’s, the club had settled on a log-periodic antenna on the 10, 12, 15, 17, and 20m band, which eventually replaced the Quad-antenna. This antenna resulted from a master’s thesis written by an ARK member around 1982. The antenna was, as far as we know, erected for many years despite many harsh winters where the freezing temperatures ruined the elements. A lot of maintenance was carried out the following spring, where the elements had to be shortened. It did contribute to the antenna faltering a bit, though, especially on the higher frequencies.
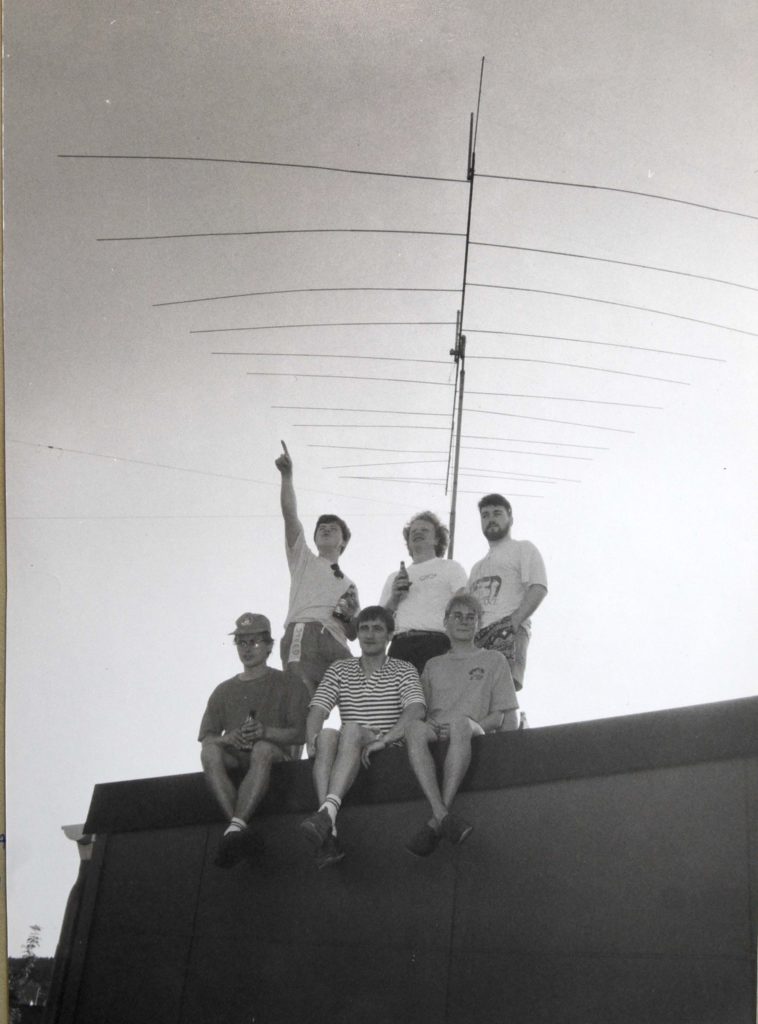
Until the 90s, the HF mast was a metal lamp post with a tilt that was modified to rotate, with a rotor at the bottom and an associated tube inside that rotated. This was the mast the club erected in 1976 and had been used ever since. Around 1993, it was decided that the club should replace this, and the following year, a lattice mast of type VersaTower W60 was purchased and installed. This was a raise/lower mast with a crank so that you could now adjust the mast up and down, e.g., in anticipation of a lot of wind or in cases where you wanted to reach particularly far. This mast was also a large and important investment for the club.

The log-periodic antenna, which had been the club’s directive antenna on HF for a long time, was replaced with the mast. The choice fell on a Force12 5BA; a 15-element 5-band yagi antenna without traps (33′), one of the better things money could buy at the time. The antenna was bought by the station manager’s cousin, who was a visiting lecturer at Stanford at the time. It was bought, repackaged and sent to Trondheim as a “gift” to himself, addressed to the Student Society. Digital modes on HF also got a boost after purchasing an AEA Pakratt PK-232 modem, which, with a Racal PA, made it possible to run RTTY until “your ears fell off”. Otherwise, there is also a mention of a Ten-Tec Omni VI that was purchased during the decade. Both the VersaTower mast and the Force 12 5BA antenna are in use by the club today, necessarily with some ongoing maintenance.
In the 2000s, the club had long since become interested in doing well at the Field Day contest. Therefore, not long after one of the old PA stages threw in the towel just before Field Day, that we “suddenly” got funds to purchase a new PA, namely an Ameritron AL-82. This year, ARK acquired a new satellite radio, a Kenwood TS-2000, which was mainly used for operating the club’s VHF array. At this time, the club also purchased an Icom IC-756Pro III to replace the old Ten-Tec Omni VI rig. The IC-756Pro III is one of those radios that, in recent times, can be said to have been a “favorite” among several of the active at the time, and it was still in the shack long after it was outdated. It and the AL-82 are still in use during Field Day, with slightly more sparing use the rest of the year.

Modern era
In the 10s, the club received a whole bunch of new upgrades. We got 2 new transceivers in the shack, Icom IC-9100 and Flex 6500, and a new Acom 1000 PA stage. Other upgrades include 4- and 6m yagi antennas with the rotor, new VHF array, 3m satellite dish, rotatable dipole for 40/30m, BigIR vertical antenna, and setup for SatNOGS. For Field Day’s part, a 40m dipole called “Bananaphone” was made, as well as a “Spiderbeam” antenna for 20, 15, and 10 m, with associated triplexers and bandpass filters, which remain in the shack for the rest of the year. There was absolutely no shortage of things for the members to do, and the documentation from these projects is described in such detail that there is not enough space to write about in this article. For those interested, it is recommended to have a look at our website occasionally, where there are more recent pictures and more information about the upgrades and the equipment.
Now, in the 20s, we had our IC-9100 “swapped” with a newer Icom, IC-7610, which became the actual heir to the IC-756ProIII, which in turn had a permanent place of residence in the shack until that time. Today, the IC-9100 is still in the shack as VHF/UHF and satellite rig, Flex 6500 is located as HF-shack “A”, and IC-7610 is located as HF-shack “B”. This decade, we have also received a particularly large donation from a local radio amateur, LA1DI, namely a Yaesu Quadra transistor-based PA stage with an output of 1kW. This is if not quite, one of the first transistor-based PA stages the club has had at HF, and it was an upgrade that had already been budgeted for a few years in advance. However, it turns out that connecting the Yaesu stage with other radios was not as quickly done as one had thought, but for now it has replaced the Acom 1000, which was moved to shack “B” together with the IC-7610.

Although ARK’s radio equipment has been upgraded several times since the club’s inception, there are certain things that still refuse to die. The “Store-PA,” which was originally built for the “UKE-broadcaster” in 1967, is still used when the club goes out on Field Day. Necessarily, regular repairs are involved after several decades in service. Still, it turns out that the club’s construction projects from that time were of good quality and were always built to last.
Featured image captions: Newly remodeled “kitchen bench”, fall 1978
– Heidi LB9WI, Kristoffer LB0VG and Sondre LB5PI
(Article first published in “Amatør Radio”, April 2023)